スバルショップ三河安城の最新情報。自動運転の歴史と、アイサイトの発展。| 2017年6月30日更新




ニュース ピックアップ [ 特集記事 EyeSight 安全 アイサイト ]
2025年12月12日 スバル
2021年02月26日 スバル

2021年02月05日 スバル
![新型レヴォーグ[VN型]特集:その5 アイサイトXとアビオニクスとSTARLINKと。](images/VN5_debut_2020_232.jpg)
2021年01月09日 スバル
![新型レヴォーグ[VN型]特集:その4 新世代アイサイトの技術詳細とインプレッション](images/VN5_debut_2020_215.jpg)
2019年11月13日 スバル
2019年11月04日 新着情報

2019年10月27日 スバル

2019年01月06日 スバル

2018年07月27日 スバル
2018年04月04日 クラブ・スバリズム

文責:スバルショップ三河安城 和泉店
お問い合わせ:0566-92-6115
担当:余語
自動運転の歴史とアイサイトの進化。〜第10回「クラブ・スバリズム」テキストより〜
世界初の自動車事故。事故ゼロへの道のりは果てしない。

via Wikimedia Commons
1769年、フランスで初めて「自動車」は走ったその日は、世界最初の自動車事故の日となりました。歩くほどのスピードにも関わらず、曲がり切れず塀に衝突してしまったのです。
それから、150年。長く華やかな自動車のの歴史の裏側には、数多の命の犠牲があるのを忘れてはなりません。
以来、自動車事故の撲滅、事故犠牲者ゼロへ向けての取り組みは休むこと無く続けられてきましたが、未だに犠牲者の数は増え続けているのが現実です。自動車メーカー各社は事故ゼロの実現へ向けて、ヒューマンファクターの除去を念頭に自動運転の実用化を目指しています。
今回は、レベル2を実現したとも言われるアイサイト・ツーリングアシストの発表を記念して、第10回クラブ・スバリズムのテキストをお届けします。
自動運転は、なぜ困難なのか。
回転寿司のデリバリーシステム(シンカンセン)を考えてみましょう。カーブや駅となる各テーブル位置は予め決まっていますし、経路はレール上に限定されます。予想される事象しか起こりえない、もしくはそうした場合に非常停止処置を取れば良いもの、こうしたものは比較的早期に自動運転が実現しています。
しかし、自動車は違います。道のある場所ならどこでも目的地たり得ますし、経路は自由。レールもありません。また、歩行者、対向車、落下物などあらゆる不測の自体が起こり得ます。道路も、前回とまったく同様とは限りません。また、エラーが発生した場合に、何時でも何処でも非常停止処置を取るという訳にはいきません。
自動運転を難しくしているのは、道路上を走行するすべての車両は道路交通法上の責務を負うという点であり、そのシステムの運用を「素人」が行うという、この2点に尽きます。自動運転と言葉で言うのは簡単なのですが、非常に難易度の高いシステムです。今、人類は非常に困難な課題に挑戦しているのです。
今から60年以上も前に造られた、自動操縦の戦闘機。

自動運転をいち早く実現しようとしたのは、核攻撃からの自衛を図る米国戦略空軍でした。F-106「デルタダート」は、地上の半自動式防空管制組織(SAGE)とデータリンクして自動操縦で飛行、ソ連の爆撃機部隊を迎撃しようという画期的なウェポンシステムでした。今では、さもありなんとするシステムですが、これが開発されたのは、1958年のこと。水平線の向こうから飛来する核攻撃機を投弾前に撃滅するには、数分の余裕もありません。安全保障会議も作戦ミーティングを行う時間も、一切無かったのです。とにかく、離陸していち早く迎撃する必要がありました。
SAGEは、レーダースコープで発見された敵機の進路を予測し、F-106編隊との会合ポイントを予測。離陸したF-106を自動で誘導します。5万5千本の真空管を使用し、面積は2千平米、消費電力は最大3MWに達する巨大なコンピューターで、現在の価値で1兆円近い予算を要したと推定されています。最初の自動運転システムは、これだけ巨大なものだったのです。
ひとたび核戦争が勃発すれば、ソ連の大爆撃機部隊が押し寄せるはず。SAGEは、これをいち早く探知し、対応するのが目的です。そのため、SAGEのうちのひとつはソ連により近いカナダの設置されました。ここがNORADです。1955年の12月24日の夜。ソ連の影にピリピリと張り詰めていたNORADの司令長官席に、ひとつの間違い電話がありました。それは子供からで、サンタクロースの場所を尋ねるものでした。近くのホームセンターが、キャンペーンの電話番号を間違えて掲示していたのです。司令長官はその質問に、「レーダーで調べた結果、サンタが北極から南に向かった形跡がある」と回答。以来、50年。NORADの提供するサンタクロースの追跡サービスは、クリスマスの風物詩として知られています。
いち早く実用化された民間航空機のオートパイロット

航空機の操縦について考えてみましょう。飛行機が巡航状態にあるとき、状況は比較的シンプルです。位置と飛行姿勢、気流の状態さえ分かれば、自動操縦は困難ではありません。そのため、民間航空機でも1960年代にはオートパイロットが実用化されました。オートパイロット化により、不測の事態が発生しても、パイロットは原因究明に集中できるため安全性が却って向上したと言われています。
一方、事故のほとんどが集中すると言われる離着陸前後の「魔の11分間」は、極めて危険な時間帯です。地上付近は気流が安定せず、飛行機は飛行姿勢を変化させるので、不確定要素が多いのです。現在においても、離陸は一切自動化されていません。一方、着陸進入に関しては、設備、機体、パイロット、天候のすべての条件が整った状況に限り、自動着陸が認められています。
なお、艦載機のF/A-18ではカタパルトからの発艦が自動化されています。パイロットは操縦桿から手を離して、把手を掴んだまま機体は射出されます。より難易度が高そうな、離艦が自動化されているのは意外ですね。
実は、現代の航空機は常に自動操縦されて飛行している。
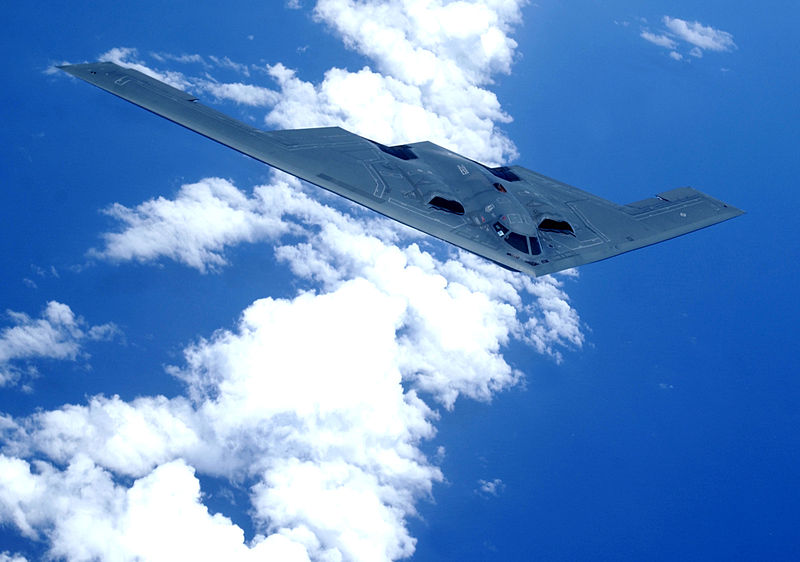
B-2ステルス爆撃機をご存知でしょうか。ブーメランの様な特異な形状のこの航空機には、水平尾翼も垂直尾翼もありません。本来、航空機は主翼、水平尾翼、垂直尾翼の3点セットで「安定」を作り出し、飛行姿勢を維持しているのです。安定とは、挙動が収束する方向に特性を持つことを言います。尾翼が無ければ、常に安定しません。挙動は発散、つまり操縦不能へと至ります。ならば、如何にしてB-2は「安定」して飛行しているのでしょうか。
現代の航空機では操縦桿と補助翼は機械的には接続されておらず、電気信号に変換されてからアクチュエータに伝達されます。これを、フライバイワイヤと呼びます。パイロットが操縦桿を引いて上昇しようとした場合、「そのようになるよう」に動翼を作動させて、機体を上昇させます。
尾翼のないB-2では、制御コンピューターが機体の挙動を認識していて、予期しない挙動が生じた際は自動で当て舵を行なって機体を強制的に安定させています。この人工的な安定によって、B-2はつつがなく飛行できるのです。
技術の進歩により、今ではどんな形状のものであれ、推力さえあれば飛ばせると言われています。戦闘機では逆に意図的に動的安定を壊して設計することで、機体の旋回性能を向上させています。現代の航空機は、常に自動操縦の助けがなくては水平飛行さえ難しいのです。
幅広く利用が広がるUAV(無人航空機)。

CIAの主導するブラックプロジェクトから生まれたUAV。当初、偵察用機材として構想されたUAVですが、今では弾薬の投射が可能な機体も実用化されています。戦場から遠く離れた米国本土で作戦を行うパイロットが人間的に破壊されていく様は既に映画化もされていますが、その冷徹な作戦の実態は今以てすべては明らかになっていません。
現在運用中のUAVは、自律飛行が可能です。その点で、ラジコン飛行機とは区別されています。上面に内蔵されたパラボラアンテナで無線中継を行い、オペーレーターからの支持を受けつつ飛行しています。オペーレーターが地図上のポイントを指定すれば、そこまで自動で飛行。補足されたターゲットの攻撃許可を受けて、誘導弾で「破壊」します。一方で、その離着陸は未だにラジコン操作で行われています。
UCAVは、米国海軍でキャンセルされた無人攻撃機プロジェクトです。既に技術は確立されていて、空母での自動離着艦試験も順調に終了しています。キャンセルされた理由は「無人」だから。パイロットは優秀な人財が多く、海軍上層部でも大きな力を持っています。我々の誇るべき航空機が、自動で飛ぶなどまかりならん。というのです。このプロジェクトは「あらゆる手段」を用いて潰されました。
中華航空140便墜落事故
.jpg)
(CHINA AIRLINES A300B4-220 (B-1810/179)) [CC BY-SA 2.0], via Wikimedia Commons
1994年4月26日に発生した名古屋空港で発生した、中華航空140便墜落事故は自動操縦装置の異常動作に起因するもので、自動操縦に関する多くの課題を私たちに突きつけました。
20時16分、中華航空140便(エアバスA300-600R)は台北空港を発って名古屋空港に着陸進入中に失速。滑走路東側に墜落、炎上します。この事故で乗員乗客271名中264名が死亡しました。生存者は、すべて主翼桁上に着席していた乗客でした。
140便は副操縦士による手動操縦でのILS(計器誘導)進入で着陸態勢に入っていました。140便は順調にILS進入を継続していましたが、同14分05秒、副操縦士が誤ってゴー・レバー(ゴー・アラウンドや離陸開始時に推力最大にするレバー)を操作したため、ゴー・アラウンド・モードになって推力が増加。機体は推力が増したために、正規の降下経路から浮揚してしまいます。
機長は、副操縦士に対して、ゴー・レバーの解除を指示。さらに、副操縦士に対し上にズレた降下経路の修正を指示します。副操縦士は、操縦桿を機首下げ方向に操作。それに加えて、自動操縦で本来の着陸高度に戻すために、副操縦士はオートパイロットを作動させます。しかし、ゴー・レバーはそのままだったため、ゴー・アラウンド・モードは解除されておらず、自動操縦のコンピュータは意に反して、ゴー・アラウンドをするため高度を上げようとします。
操縦桿の操作によって、昇降舵は機首下げ方向に動作。これに対し、水平尾翼はコンピュータによって機首上げ方向に限界まで作動。この時、機首下げの効果が若干上回ったために、機体は降下を始めます。同14分50秒頃、オートパイロットをオフにします。
機体は機首上げを起こし迎角が増加したことで、同14分57秒過ぎに失速防止装置が作動。推力が一気に増加し、さらに機首上げが強くなります。同15分03秒、機長が操縦を代わるも機首角は10度以上に達します。機長は、15分14秒頃に着陸を断念。管制官にゴー・アラウンドを通報します。しかし、水平尾翼は機首上げに限界まで作動していたため、昇降舵を戻したことで機体は急上昇。機首角が53度に達したことで、失速。同15分45秒、墜落に至ります。
直接的な墜落原因は、自動操縦と手動操縦の競合にあります。当時のエアバスの設計では、自動操縦を手動操縦がオーバーライドできる設計にはなっていなかったのです。また、そうした場合に特別な警告もありませんでした。また、ゴー・レバーが誤って作動しかねない機構だった点も見逃せません。
その一方で、クルーが機体システムについて理解が不十分だったことは、厳しく指摘されるでしょう。ただ、極度の緊張状態ではヒューマンエラーは起こりうるものであり、こうした状況下においても正しくシステムが作動するよう、十分に考慮されねばなりません。
ヒューマンエラーと自動操縦の欠陥、そのどちらが起こり得るものです。その上で、人間とコンピュータのどちらを優先すべきなのでしょう。現時点では、人間の最終判断を優先すべき、というのが工学分野における共通認識です。そのため、操縦ミスや判断ミスによる事故は、回避することはできないのが現状です。
鉄道における自動運転システム。

今度は、鉄道を見ていきましょう。鉄道では、信号と信号の間の区間を閉塞区間と呼び、この閉塞区間内には1列車しか進入でない決まりになっています。列車が進入すると信号は赤に変わり、後続列車は信号で停止させられます。先行列車が閉塞区間を出て、次の区間に進入すると信号が黄色に変わり、次の信号までの進入が許可されるシステムです。
戦前には、自動列車停止装置(ATS)が既に実用化されていました。これは、信号の冒進時に非常停止させるもので、今でも多くの路線で利用されています。しかし、初期のものでは運転士の規則外の運用などで事故は発生し続けていました。
国鉄は戦後、三大事故(桜木町事故・三河島事故・鶴見事故:合わせて427人が犠牲になった。)と呼ばれる大きな事故を起こしています。その実態はあまりにも凄惨で、現在の鉄道の安全対策はこの教訓をもとに構築されたものです。車両の難燃化対策、非常ドアコックの設置、事故時の乗客誘導、事故発生時の隣接路線の緊急停止処置などです。
こうした教訓をもとに開発が行われたのが、世界初の高速鉄道。東海道新幹線でした。
桜木町事故の責を負って鉄道技師長を辞していた鉄道技師島秀雄は、1955年国鉄総裁十河信二が復帰を要請により復職。動力分散化による電車列車の普及を始め、近代日本の鉄道の礎を築きました。島は、極めて堅実かつ保守的な技術者で、東海道新幹線の開発に際しても、先端技術の導入を意図的に避けたことでも知られています。鉄道においては、安全をすべてに優先すべきと考えていました。
1964年10月1日、自動列車制御装置が実用化された日。

東海道新幹線には、唯一最新技術が採用されていました。初めて本格的に採用された自動列車制御装置(ATC)でした。従来にない高速連続走行を行う新幹線では、地上の信号の確認が困難になるうえ、制動距離は数kmに達すると考えられていました。東海道新幹線では、信号の冒進が起きた後に非常制動がなされる旧来のATSではなく、許容速度を設定して列車間距離を積極的に制御するシステムが求められました。これが、ATCです。
東海道新幹線のATCでは、運転台上に制限速度が表示される車上信号方式を採用し、如何なる状況でも確実に安全が担保される、自動列車制御装置を実現しています。閉塞区間毎に許容速度が設定され、運転士はこの速度を上限に運行します。列車が許容速度を超過すると自動でブレーキが作用し、許容速度まで自動減速します。最終的には、運転士の操作が一切無くとも停止まで自動で行われます。全走行列車は、東京駅の中央列車制御装置が一元的に管理。各列車に自動で制限速度を割り振って、列車間距離を制御するシステムになっていました。
今では東海道新幹線のATCはさらに進化しており、半自動運転での運行が可能になっています。
ATCの次のシステム、ATO。

自動列車運転装置(ATO)は、列車の運転を自動化するシステムで、ホームドアを備えるなど人に対する安全性を確保しやすい、地下鉄や新交通システムで主に使用されています。ATOにも種類があって、ゆりかもめの様に運転士が乗務しない無人運転のものと、運転士が乗務して安全確認後を出発操作を行うものがあります。本格的に実用化されたのは、1976年開通の札幌地下鉄東西線であり、車庫からの出入庫を自動で行なっていました。ATOを使用する各路線でも、実際には運転席が備えられていて、運転士の技量低下を防ぐために時折「人力運転」が行われています。
これが、この度本格着工されたリニア中央新幹線となると、もはや運転席さえ存在しません。前方認識用カメラが備わるのみで、運行は中央列車制御システムですべて自動で実施されます。新幹線運転士はいつでも憧れの職業でしたが、そんな時代も終わりを告げようとしているのでしょうか。
鉄道における自動運転とその課題。
鉄道では、同一線路上を一方向に列車が移動します。制御対象が先行列車に限られますから、システムの難易度は高くありません。しかし、ひとたび事故となるとその被害は甚大です。そのため、鉄道の自動列車制御システムでは何重ものフェールセーフ機構が備えられ、安全が確認できない場合は全列車に対する非常停止処置を取って安全を確保します。こうして、如何なる場合であっても鉄道は「最低限」の安全を確保しています。
自動列車運行システムは50年以上を掛けて慎重に開発されてきました。結果、東海道新幹線は開業以来、運行事故ゼロの記録を更新し続けています。これは世界に誇るべき記録です。しかし、それは多分に人的努力に因るものであって、システムの優秀性によって成し遂げられた記録ではありません。
自動運転システムは、数限りない人命を預かるものです。まず第一に、安全。この観点は非常に大切なものです。
いち早く実用化されたダンプカーの自動運転システム
自動車において、もっとも早く自動運転が実用化されたのは、海外の鉱山などで使用されるダンプカーでした。オーストラリアのある鉄鉱石の採掘場ではすべてがオートメーション化されており、露天掘りの構内はまったくの無人です。この構内を自動制御されたダンプカーが走り回り、これまた自動制御された貨物列車に積載します。管理室は遠く離れた都市部にあるため、人材確保も容易となるうえ、人身事故の心配もありません。人里離れた環境が存在するオーストラリアならではのシステムかもしれません。
自動運転の定義

自動運転は、一般的に以下のように定義されています。
レベル0:ドライバーが主制御(加速・操舵・制動)の操作を行う。警告音などの運転支援システムも含む。
レベル1:主制御のどれか一つをシステムが操作。自動ブレーキシステムを含む。
レベル2:二つ以上の制御をシステムが実施。追従クルーズを含む。一定時間以上の自動操舵は認められない。
レベル3:すべての制御をシステムが実施。緊急時のみドライバーが操作を行う。2020年の実用化を目指す。
レベル4:緊急時を含め、完全自動運転を実施。人間は乗客であり、人工知能が人間に代わって運転を行う。
レベル3以上の自動運転に関して実用化に際した実証試験でも特認が必要となるため、政府および地方自治体の協力が必須となります。
自動運転のキーテクノロジーは何か。

自動運転では、状況認識や判断を行うECUの処理速度の向上が求められています。かつて、ゲームPC用のハイエンドGPUボードを主力製品としていたNVIDIAは、自動運転の実現へ向けて積極的にカンファレンスを開催し、次世代をリードしようとしています。光学センサーからの情報を高速処理し、注目すべき物体を抽出するアルゴリズムや、その開発環境の提供を行なっています。この努力によって、レベル3の実現は目処が立ちつつあります。日産はセレナに渋滞時自動運転機能を実現した「プロパイロット」を既に発売しており、スバルも後期型レヴォーグ/WRX S4にて「アイサイト・ツーリングアシスト」で同種の機能を実現しました。
しかし、この先のレベル4の実現に向けては、まだまだ課題が山積しています。もっともキーとなる、人工知能の技術発展が未成熟なのです。レベル4では、システムが運転手として「判断」をせねばなりませんが、瞬間的かつ慎重な判断が必要です。ビッグデータの活用も考えられています。各車両から収集したデータを解析して走行パターンを抽出すれば、よりスムーズな自律走行が可能になる可能性があります。
いずれにせよ、航空機および鉄道でも実現していない完全自動運転化を、より複雑な自動車で実施するにはハードルはまだまだ高そうです。
運行管理責任者は誰か。

スマホで目的地をタップして、クルマにセット。すると、クルマが勝手に走り出し、昼寝をしているうちに目的地に到着。これが理想の自動運転です。障害のある方でも、高齢者でも、あらゆる方が誰の手をわずらわせることなく移動できる。そんな夢の社会は果たして実現するのでしょうか。
自動車の運転に際しては、運転者に運行責任が生じます。しかし、自動運転の場合、運行責任者は誰になるのでしょう。昼寝をしていた利用者でしょうか、それともシステムを運用するシステム管理者でしょうか、それともシステムの開発責任者でしょうか。しかし、事故が起これば誰か責任を負わねばならないのです。ここが自動運転にとって、もっとも大きなハードルとなるでしょう。
自動運転は本来、ヒューマンファクターを除去して事故ゼロを達成するために構想されたものあって、ドライバーにラクをさせるためのものではありません。ドライバーエイドの過剰な発達は、運転手の安全意識の低下をもたらします。これでは、本末転倒と言えるでしょう。
スバルは、敢えて自動運転機能に手放し運転対策を自主的に盛り込んでいます。20秒を超えてステアリングの手放しが検出されると、車線中央維持機能が勝手に切れてしまうのです。これは、ドライバーの安全意識低下を防ぐ取り組みのひとつです。
用いられるセンサーの種類。
様々な分野で用いられるセンサーはいくつか種類がありますが、運転支援システムに使われるのはどんなものが使用されているのでしょうか。
センサーにはそれぞれ向き不向きがあるため、以前は能力を限定して運転支援システムを構築していました。ミリ波レーダー方式では白線や標識、信号の認識が不可能なので、追従クルーズと衝突被害軽減ブレーキしか実現できませんでしたし、赤外線センサーでは探知距離が短いため警告機能のみに留めたものもありました。
近年では、センサーの利点を組み合わせて用いることで、各種機能を実現するのが一般的です。例えば、マツダのシステムでは車両の探知にはミリ波レーダーを用い、白線の認識には単眼カメラを、そして歩行者探知には赤外線センサーをそれぞれ用いています。
・光学センサー

人間の目と同じく、可視光線を受光して探知します。画像処理によって物体の抽出やで状況認識が可能ですが、測距は不可能です。雪面や壁面など色彩変化のない場所、目視が不可能な暗部や逆光、荒天下では認識ができません。光学センサーには、単一カメラを使用する単眼カメラ方式と、複数のカメラを用いるステレオカメラ方式に分類されます。ステレオカメラ方式では画像処理による測距の他、形状による物体の識別が可能ですが、高度な画像処理技術が必要とされます。一方、単眼カメラは白線や標識の認識に限定し測距機能は他のセンサーで補うのが一般的ですが、単眼カメラでも時間差を使って物体の移動速度を抽出できるものも登場しています。
・赤外線センサー
赤外線センサーは、物体の持つ熱エネルギー放射を探知するものです。可視光線に依らないため、暗い場所でも人間の検出が可能です。かつては、液体窒素によるセンサーの冷却が必須でしたが、今では冷却不要のセンサーが実用化されており、さらに普及が進んでいます。欠点として、大気温度と表面温度が変わらない物体の探知が不可能な点が挙げられます。低価格のものが多く、軽自動車用に当初普及が進みました。近年では他のセンサーと組み合わせて、幅広く利用されています。特性上、白線や標識の識別は不可能ですが、ステレオカメラ方式とすれば測距も可能です。
・レーザーレーダー
上記2つと違い、物体に照射して反射したものを探知するアクティブ型のセンサーです。レーザー発振器を用いて人工的に造られるもので、可視領域外のものを含めてレーザーと呼びます。指向性や収束性が高く、コヒーレントなのが特徴です。対象物体に照射し、受信波の時間遅れから距離を演算します。レーザーは測量などにも用いられる程、高精度での測距が可能です。
可視領域では目に障害が及ぶ可能性があるので、赤外線レーザーが主に用いられます。探知距離が短いものの、価格が安いのが特徴です。当初は、軽乗用車向けの簡易的な運転支援システムに用いられましたが、現在ではトヨタやマツダ、Volvoのように単眼カメラと組み合わせることで探知距離の不利を補って利用する例が増えています。
・ミリ波レーダー
レーダー(Radio Detecting and Ranging:電波探知測距)とは、照射したパルス波の反射波を受信し、遠方にある物体を探知するものです。このうち、ミリ波レーダーとは電磁波のうち周波数が30~300GHzの周波数領域を利用する物を指します。
送信機から照射された電磁波は、受信機で観測された反射波の時間遅れから距離が算出できます。この時、ドップラー処理を行うと、対象物体の速度も測定できます。波長が長い方が探知距離は伸びるものの、分解能は低下します。レーダーによっては数百キロもの長い探知距離を誇るものもありますが、分解能が低く不向きなため、自動車用には波長の短いミリ波レーダーが用いられています。
電磁波を使用するため導体であることが必須で、街路樹等の不導体の探知は不可能です。
各種センサーからの情報の統合処理。
各センサーには、一長一短があります。スバルは、ステレオカメラのみを使用していますが、VOLVOなどのように数種類のセンサーを組み合わせて、システムを構築しているものもあります。
レーダーやレーザー、カメラなど複数の情報源を統合処理するには、各センサーからの情報の正否が問題となります。不伝導体である街路樹はレーダー波を反射しませんが、レーザーは反射します。一方、ガードレール等でレーダーにゴースト(誤認識)が生じた場合、レーザーにはもちろん反応しません。物体の存在の有無、そして衝突の可能性の有無を、その度毎に経験的に判断せねばならないのです。スバルは、こうした情報処理の手間を回避するために、ステレオカメラという単一情報源に頼ることにしました。アイサイトに誤作動が少ないのは、そのためです。
複数のセンサーは互いの欠点を補いますが、データの正否を判断する別途処理が必要です。それを嫌って、レーダー等は側後方警戒に使用し、前方監視にはステレオカメラを採用するメーカーが増えています。
悲しいことに、試験専用チューニングは実在する。

致命的なエラーに直結するセンサーの誤認識は、自動運転で最も懸念されます。しかし、ガードレールや街路樹、対抗車、信号機等々・・・道路上にありふれた物体の数々は「外乱」となって誤認識の原因となります。反射波が弱い有機物を距離の遠い無機物と誤認識したり、乱反射を実在する物体と誤認識することがあるのです。物体の形状で識別できない、レーダーやレーザーレーダーでは特に深刻です。
この誤認識を避けるには、探知感度と作動感度を低下させてしまえば良い。実在が怪しいのなら、無いものと扱う。本末転倒だし、性能は低下するけども、誤作動はしません。そもそも、衝突被害軽減ブレーキの公的試験は、広大な平面上にターゲットを置いて実施されます。「外乱」は存在しません。試験でハイスコアを獲得できさえすれば、消費者には分かりゃしない・・。
そんな非倫理的なシステムが実在するのは、残念ながら事実です。こうしたシステムは、実際の道路上では外乱が多くてまともに作動しません。スバルが非公式に行った社内比較試験が、右の表です。
「F-35」に見る巨大システム開発の落とし穴。
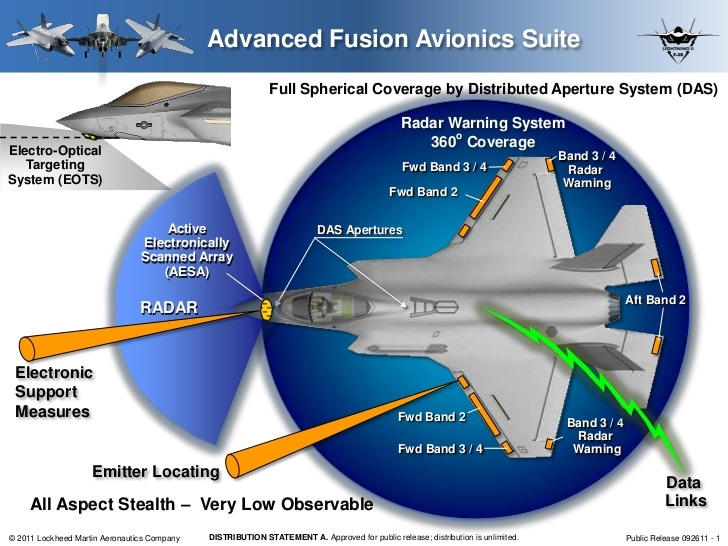
次世代戦闘機プロジェクト「F-35」では、その開発費は500億ドルに達しています。その開発費の多くは、驚くことにソフトウェアに関係するものです。F-35ではレーダー等の各種センサーの他、ネットワークからも膨大な情報が入ってきます。この中から情報を選別し、優先度を判断して、対処法を選定する。この一連の作業に要するソフトウェアに莫大な開発コストと長大な歳月を要しているのです。
自動運転システムにも、自車のセンサーの他、ネットワークから入ってくる膨大な情報を選別して、継続して処理し続けなければなりません。F-35と同等か、もしくはそれ以上に巨大なシステムとなるでしょう。しかも、たった一度の判断ミスさえ許されません・・・。
デベロッパーにはこの巨大なシステムからバグを撲滅し、継続的にアップデートし続ける責任が生じます。オープンなネットワークに接続するのであれば、ハッキングされないようセキュリティアップデートも継続する必要があります。システムのアップデートはF-35計画を大きく遅延させる深刻な問題となっており、2016年に日本向けに出荷される機体は何とベータ版のシステムを搭載する予定です。
アイサイトと自動運転技術。安全と技術発展。
性能を第一とした三菱に対し、中島飛行機は常に性能よりも人命第一。この考えは富士重工業にも引き継がれ、1965年には早くも衝突実験を開始。デザインよりも、空力よりも、安全を再優先にする設計をかたくなに守り続け、今では衝突安全性能で世界最高峰の評価を受けるに至っています。
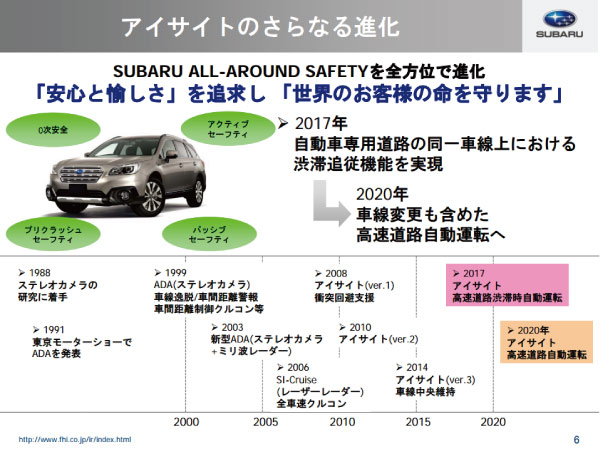
「人は必ずミスをする」という航空機開発の観点から、1989年に研究に着手した安全運転支援システム。以来、信頼性を第一として着実に前進を続け、アイサイトと名を変えた今では世界最高の性能を誇っています。スバルは、2020年に向けてアイサイトの次なる目標を「車線変更を含めた高速道路自動運転」に定めました。今のアイサイトから考えれば、慎重すぎる目標設定とも思えますが、なぜなのでしょう。
それは、スバルがシステムに「完璧な信頼性」を求めているからです。システムにエラーがあれば、事故を誘発しかねません。安全運転支援システムが事故の原因となるなど、あってはならないのです。リスクがあるなら、安全を取る。それが、スバルの安全技術に対するアプローチです。
四半世紀におよぶアイサイトの開発史。
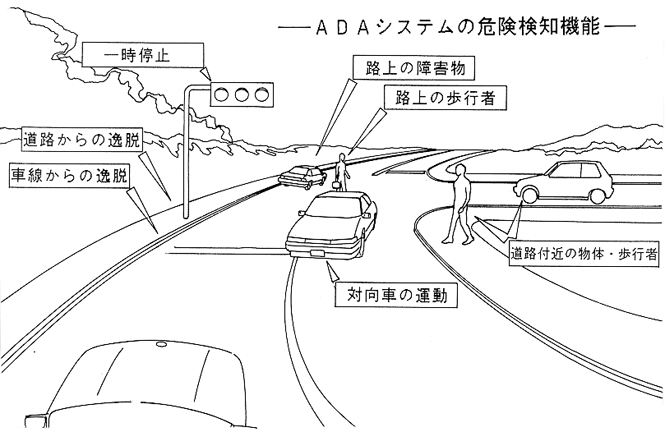
スバルがステレオカメラの研究に着手したのが、実に四半世紀をさかのぼる1988年のこと。予防安全の先進技術として「ADA(アクティブ・ドライビング・アシスト)」を一般公開したのは、1991年の東京モーターショーでした。
ADAの特徴は、「ステレオカメラ」と呼ばれる2つのカメラにありました。人間の目は、画像から物体の形状を、左右の画像のズレから物体の距離を認識しています。ステレオカメラは人間の目に倣って、2つのカメラからの映像を高速で画像処理することで、複数の物体の形状と距離を高精度で同時に認識することを目指していました。さらに、ステレオカメラで得られた情報をリアルタイムで高速連続処理することで道路状況や障害物を認識、この情報をもとにドライバーの運転を支援する構想でした。「安全間隔走行」「車線追従走行」「障害物回避」の将来的な実現を目指していたのです。
当時、こういった将来的な車載前方警戒システムには、シンプルな赤外線センサー方式や、航空機で用いられるレーダー方式、測量で用いられるレーザーレーダー方式などが有力だと見なされていました。当時の技術では、このような高速連続処理が可能な高性能コンピュータを車載することはまだ難しかったのです。そのうえ、画像から状況判断を正確に行うには、ソフトウェアの熟成が欠かせませんでした。製品化には、まだ長い道のりが必要だったのです。
1998年、遂に製品化。「レガシィランカスターADA」

1998年、スバルは「レガシィランカスターADA」を発表。世界ではじめてステレオカメラによる運転支援システムを製品化しました。このモデルでは車線逸脱警報、車間距離警報、車間距離制御クルーズコントロールの他、地図データの参照によってカーブ警報/シフトダウン制御を実現していました。が、衝突被害軽減ブレーキはまだ実用化できませんでした。当時は、システムが操作を完結する自動ブレーキは認可されておらず、カメラの解像度や感度、コンピュータの処理能力にも限界があり、画像処理技術も未発達だったのです。
ミリ波レーダーを追加し、ステレオカメラを補う新たなADA。

そこでスバルは、ADAのさらなる進化のためにレーダー方式やレーザーレーダー方式にもチャレンジ。ステレオカメラと組み合わせて、互いの欠点を補うシステムにもチャレンジしました。これが結実したのが、2003年発売の「レガシィツーリングワゴン3.0R ADA」です。ステレオカメラにプラスしてミリ波レーダーを搭載。車間距離制御クルーズコントロール、車間距離警報、車線逸脱警報、VDCプレビュー制御、追従モニター、ふらつき警報、グリップモニター、前車発進モニターを実用化しました。価格は+70万円。このオプション金額が大きな問題となります。
ミリ波レーダーを廃止。EyeSightへ。
スバルが目指したのは、交通事故ゼロでした。高額なオプション費用を捻出できる方のみが、安全技術の恩恵を受けるというのは本意でなかったのです。システム価格が高騰した原因は1にも2にもミリ波レーダーにありましたから、スバルはステレオカメラのみで、すべての機能を実現するよう方針を転換します。
様々なセンサーを試みる中で、他の方式には真似できないステレオカメラの利点がはっきりと見えてきたのです。レーダー方式やレーザー方式に比較して、ステレオカメラ方式では圧倒的な高精度で対象物体の形状と大きさを識別可能でした。ただ残念なことに、ステレオカメラ方式の実現のためにはカメラやコンピュータなど、他の技術の発達を待つ必要があったのです。
アイサイト登場。とまらない進化。

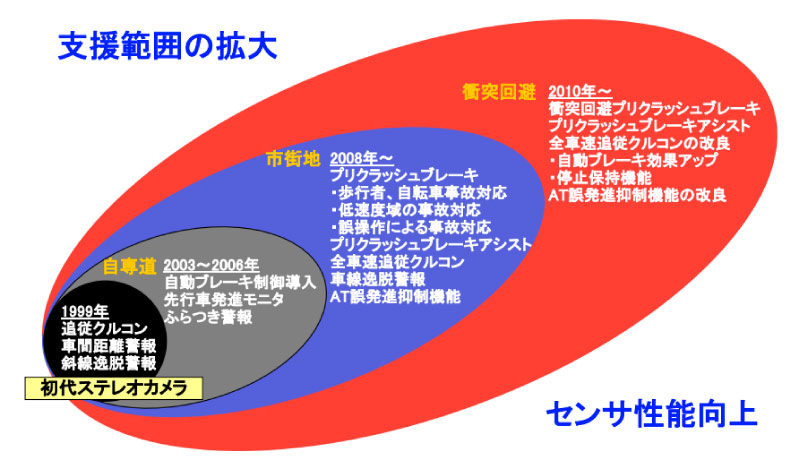
2008年「レガシィ EyeSight」がついに発売されます。
悲願であった、新世代ステレオカメラへの換装によって、衝突被害軽減ブレーキである「プリクラッシュブレーキ」がついに実現します。しかし、この時点では最大減速Gは0.4Gに制限されていましたから、衝突回避は不可能でした。前車との車間距離をもとに停止まで車速を自動制御する「全車速追従機能付クルーズコントロール」、車線逸脱・ふらつきを感知して警告する「車線逸脱警報」、前方の障害物を感知した状況での急発進を防ぐ「AT誤発進抑制制御」など、ドライバーの運転を支援する数々の機能を実用化しました。
ただ、この時点でカメラ+ECUは完成されており、実際には衝突回避は可能でした。実用化が阻まれたのは、国交省が「自動ブレーキ」を認可しなかったためです。一方で、ドライバーの意志に介入するシステムに対して未だ疑念があったのも事実でしょう。
2010年には「EyeSight ver.2」へと、さらなる進化。

EyeSight ver.2では、相対速度時速30キロ(公称)までの衝突回避を可能にし、作動制限速度は無制限で、クルマ・歩行者・二輪車のすべてに対応する、世界最高性能の前方衝突防止装置が実現しました。開発開始から実に22年。ADAで積み重ねてきた、技術の数々はここに結実したのです。
EyeSightが注目を集めたのは、その価格でした。70万円に達したADAとは異なり、たった10万円と一気に低廉化を推進しました。追突事故での事故負担額を考えれば、決して無駄にはならない現実的な価格です。その甲斐あって、EyeSight搭載車は販売台数の80%を占めるようになります。これまで燃費一辺倒であった国内市場に新風を巻き起こしたEyeSightは、安全運転支援システムの一大ブームを巻き起こします。
2014年、アイサイトはver.3へと進化。

ニューモデル「レヴォーグ」の登場に合わせて、新たに登場したのが現在最新のEyeSight ver.3です。視野角・視程を40%拡大、カラー画像認識化を実現し、より早期かつ正確な危険探知を可能にしました。衝突回避速度は相対速度時速50キロ(公称)まで一気に向上。レヴォーグ、S4では高速道路において、時速65キロ以上でのハンドル自動操舵が可能となり、全車速追従機能と合わせて限定的な自動運転が実現しています。
追従クルーズは、ブレーキランプの点灯を認識できるようになったため制御がスムーズになり、ver.2で問題となっていた燃費が大幅に改善されています。
EyeSightは常時2.5秒後を予測して、警告及びプリクラッシュブレーキを作動させています。ver.3では探知距離が延伸されたため、より早くブレーキを作動させられるようになりました。EyeSightが衝突を判断すると、警告とともに1次ブレーキが作動します。1次ブレーキの段階はフルブレーキングではないので、回避動作が可能です。ドライバーによる回避動作がない場合は2次ブレーキが作動。非常停止処置が取られます。NASVAの試験で、スバル車が余裕を持って停止するのは、1次ブレーキが有効に作動しているためです。
EyeSight搭載車の事故件数調査結果を公開
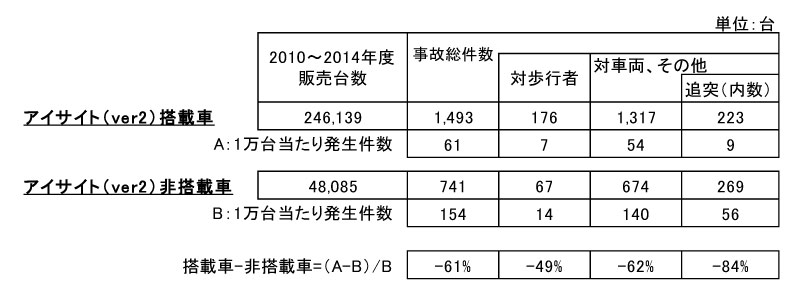
FHIは、1月26日にEyeSight搭載車の事故統計を公開しています。
2010~2014年度に国内販売したスバル車の人身事故件数について調査した結果、EyeSight搭載車は非搭載車に対し、1万台当たり件数で、車両同士の追突事故では約8割減、対歩行者事故では約5割減、調査対象全体では約6割減であることが分かりました。この調査結果は公益財団法人交通事故総合分析センター(ITARDA)のデータを基に独自算出したもので、EyeSight搭載車246,139台、非搭載車48,085台の人身事故件数をその発生状況毎に分類したものです。
高速道路の自動運転化は2020年か。
今年発表されたスバルのEyeSight開発ロードマップに従って、2020年に車線変更を含めた自動運転技術の実用化するべく開発が進められています。このバージョンではステレオカメラだけでなくデジタルマップ、レーダーなども併用され、自動車線変更や連続レーンキープ、カーブ減速が実現します。ただ、2020年のバージョンでもレベル2に分類されるようです。
2020年は東京オリンピックの開催年であり、各メーカーがこぞって自動運転の実用化を目指しています。スバルはシステムの複雑化を回避して、低価格でこの機能を実現するとしています。
完全なる自動運転はいつ実現するのか。
自動運転とは、運転を運転手から完全に「委任」された状態を指します。そのため、その実用化に際しては、完全なる信頼性の担保が必要です。また、自動車は普通自動車免許があれば誰でも運転ができます。そういう意味において、システムを完全に理解したパイロットのみがオペレートする航空機のオートパイロットとは、まったく複雑さが異なります。
近年、「UAV」と呼ばれる無人航空機分野の発達が顕著です。UAVは、セットした地点へ向けて、指定された経路を辿って到達するよう、逐次命令が可能です。しかし、目標の移動や気象の急激な変化など状況変化を伴った場合に、自ら状況判断を下すには至っていません。
自動運転技術の確立に際しては、自動車が交通環境を完全に「理解する」必要があります。なおかつ、その運転は自然で快適でなければなりません。自動運転の車両が事故を起こすことはもちろん、渋滞等の交通障害の要因となったり、交通標識の見落としなどもあってはなりません。実験的な技術だからといって、人命が危険にさらされるような事態はあってはならないからです。
文責:スバルショップ三河安城和泉店 営業:余語